Estimating Stiffness & Required Grasp Force at First Contact in a Prosthetic Hand using Vibrational Information
- Program: Biomedical Engineering
- Course: Other
Project Description:
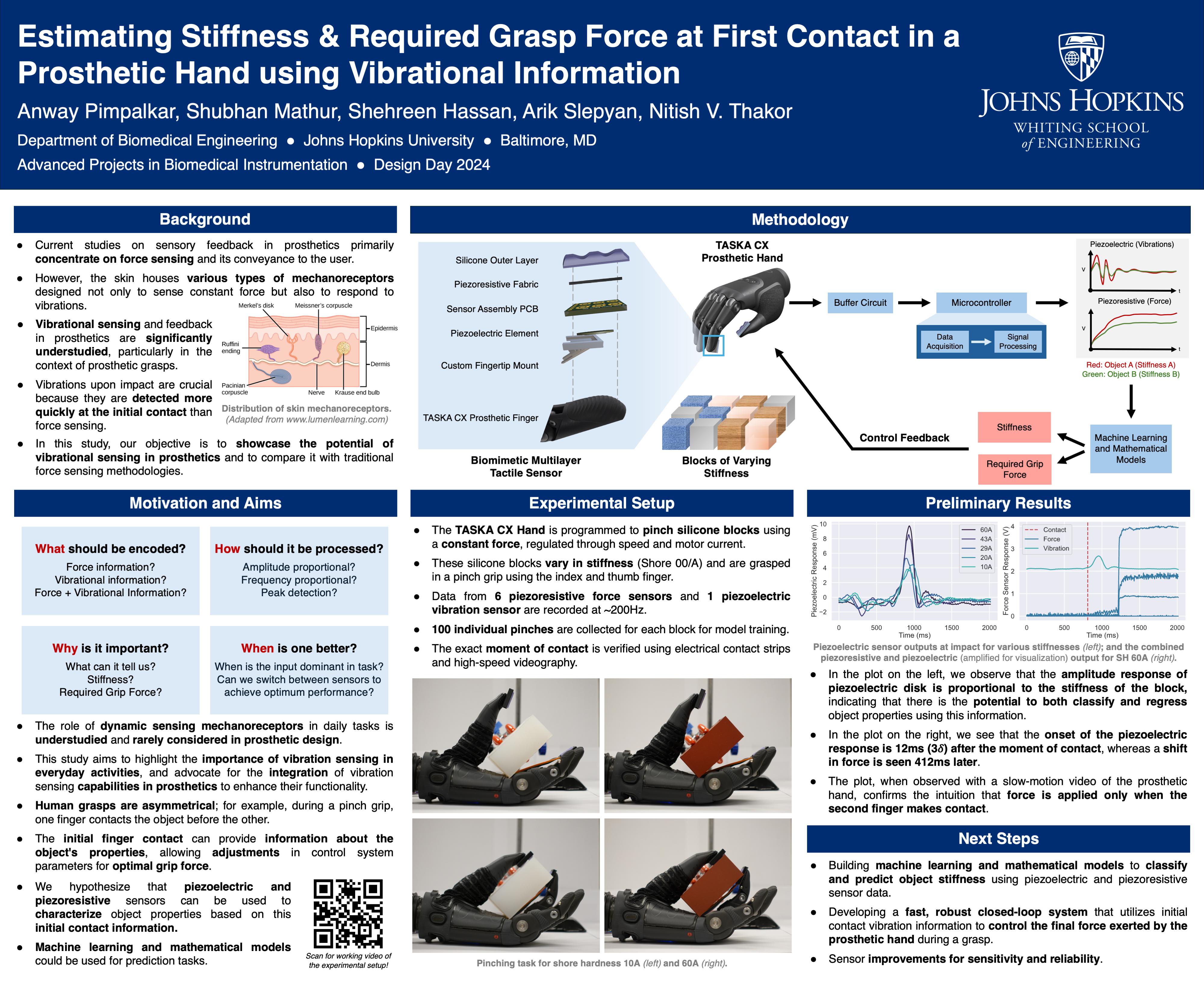
This study investigates the integration of vibrational sensing into prosthetic hands and robotic grasps, extending beyond traditional methodologies that primarily focus on encoding force information from the fingertips and transforming it into cutaneous vibrational feedback. Recognizing that human skin’s mechanoreceptors respond to a diverse array of stimuli, including vibrations that impart crucial details about object properties such as stiffness and texture, this research analyzes the vibrational signals received upon initial contact. The preliminary findings reveal that vibrational sensing in prosthetic hands can furnish users with a more nuanced perception of their interactions with various objects. Notably, vibrations are detectable upon the initial contact with an object, significantly earlier than force information, thereby establishing vibrations as a valuable metric for control systems in tasks such as grip force modulation. The incorporation of enhanced vibrational feedback capabilities could significantly elevate the functionality and user experience of prosthetic devices.
Project Photo:
Enhancing prosthetics with vibrational sensing capabilities for better control.