
Robotic Spray-Scanning for Uniform Transparent Conductive Films
Team: ECE NanoEnergy Lab
Program:
Electrical and Computer Engineering
Project Description:
Motivation: Solar energy is the most promising renewable energy source due to the vast amount of power emitted by the sun. As such, we need to be able to harness this energy on a scalable level. The conventional solar cell fabrication method is limited by energy costs, machine size, lack of scalability, and difficulty handling curved substrates. In order to address these issues, recent research efforts have focused on developing spray-castable solar cell technology using nanomaterials. This project involves the invention and development of a robotic scanning platform used to improve film uniformity and reduce clumping in transparent electrode materials for colloidal quantum dot solar cells.
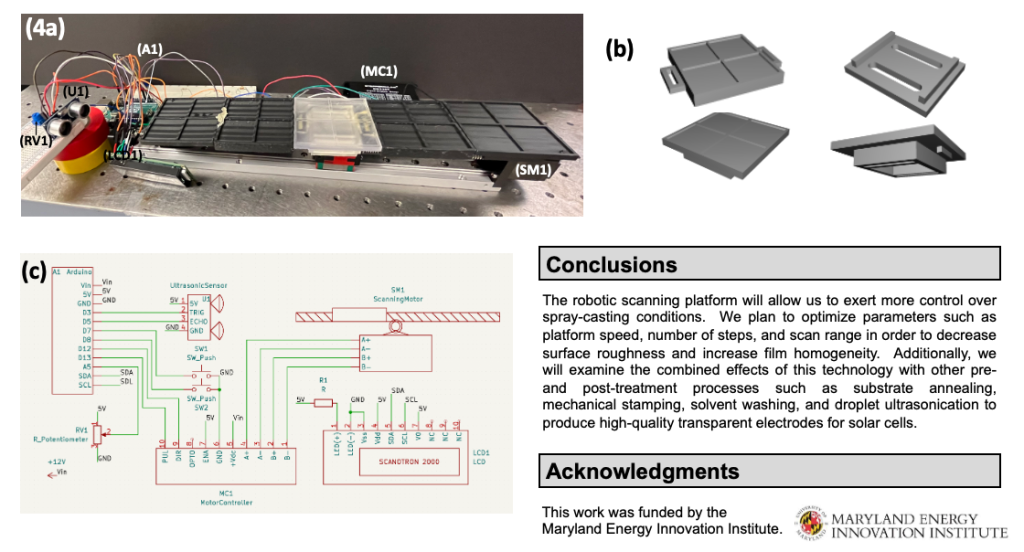
Methods: The linear scanning motor is driven by a 12V power source and controlled by an Arduino Uno R3 via an interfacial stepper motor controller. The speed of the motor is tuned by a knob potentiometer, and feedback from an ultrasonic distance sensor facing the platform informs a PID control process. A liquid crystal display (LCD) presents the user interface, where buttons control the starting and stopping of motion as well as programmable functions. The platform itself was printed on a Formlabs Form 3 stereolithographic printer and designed using SolidWorks. The pieces are modular to allow for varying platform sizes.
Team Members
-
[foreach 357]
[if 397 not_equal=””][/if 397][395]
[/foreach 357]
Project Mentors, Sponsors, and Partners
Course Faculty
-
[foreach 429]
[if 433 not_equal=””][/if 433][431]
[/foreach 429]
Project Links
Additional Project Information
Project Photo
Project Photo Caption:
Prototype, schematic, and CAD design along with the conclusion & acknowledgement